Poślizg wzdłużny koła

Mówiąc „poślizg” potocznie myślimy o sytuacji, gdy tracimy kontrolę nad samochodem. Jednak w ścisłej terminologii technicznej „poślizg” ma inne znaczenie. Bez jego występowania samochód nie mógłby się poruszać.
Poślizg – a ściślej poślizg wzdłużny koła, jest podstawowym pojęciem koniecznym do opisu zasady działania układów: ABS, ASR, ESP i pokrewnych. Coraz częściej w opisach technicznych samochodów nie są one wymieniane, ale grupa tych systemów jest „zbiorczo” nazywana „systemem regulacji poślizgu” – w j. angielskim „Slip Control System”. Jest również pojęcie tzw. poślizgu poprzecznego koła, ale to inne zagadnienie.
Siły na styku opony z nawierzchnią drogi
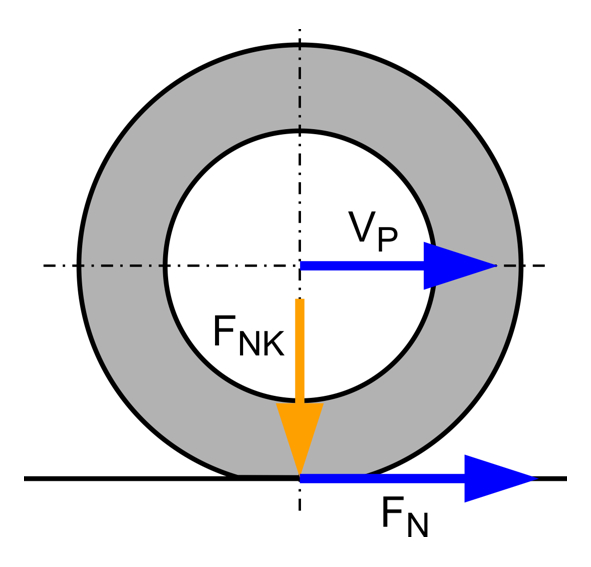
Koło pojazdu jest dociskane do nawierzchni drogi siłą FNK (rys. 1). Gdy samochód stoi, siły docisku kół pojazdu zależą od rozkładu jego masy. Podczas hamowania zwiększa się docisk kół przednich a zmniejsza tylnych. Podczas przyspieszania jest odwrotnie.
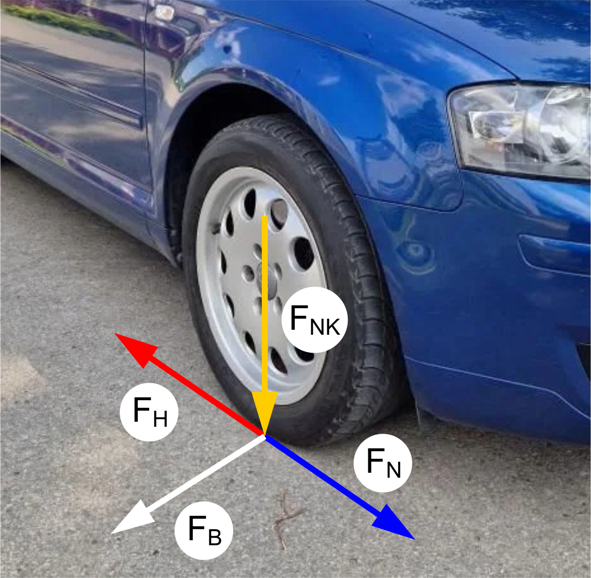
Na styku opony z nawierzchnią drogi mogą być generowane trzy siły:
- FH – siła hamowania, konieczna do zmniejszania prędkości pojazdu;
- FN – siła napędowa, konieczna do pokonywania oporów ruchu samochodu;
- FB – siła boczna, konieczna do zmiany kierunku ruchu pojazdu i do utrzymania pojazdu w ruchu po łuku.
W tym artykule zajmiemy się tylko siłami: hamowania i napędową.
Prędkość pojazdu i prędkości koła
Prędkość ruchu osi koła jest równa prędkości pojazdu VP (rys. 2). Koło pojazdu obraca się z prędkością obrotową nK. Prędkość punktu położonego na obwodzie koła – w skrócie obwodowa, wynosi VO. Można ją obliczyć znając prędkość obrotową koła nK i promień koła.
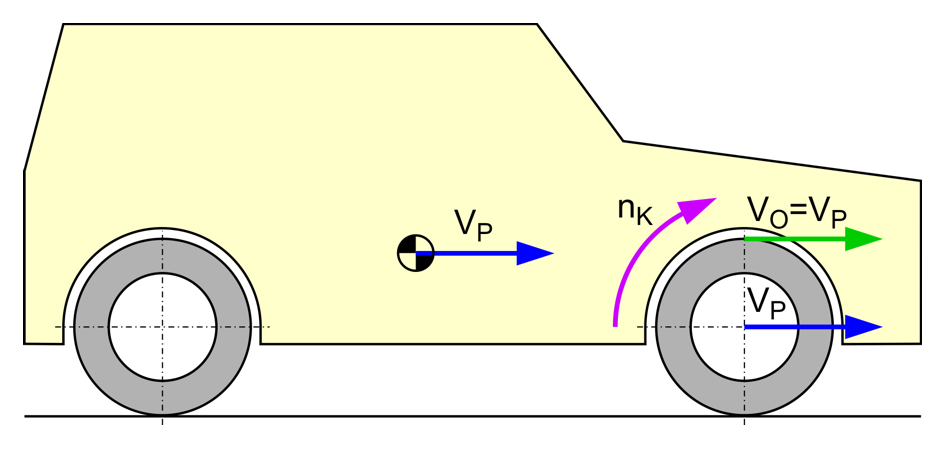
Jeśli prędkość obwodowa koła VO jest równa prędkości pojazdu VP, to na styku opony z nawierzchnią drogi nie jest generowana siła hamowania lub napędowa (rys. 1 i 2).
Wartość siły hamowania
Siła hamowania FH (rys. 3) jest niezbędna do zmniejszania prędkości samochodu lub utrzymania jej stałej wartości podczas zjazdu z wzniesienia. Jednak podczas zjazdu należy hamować silnikiem, w celu utrzymania stałej prędkości – to jest prawidłowe, a hamowania z wykorzystaniem hamulców należy unikać.
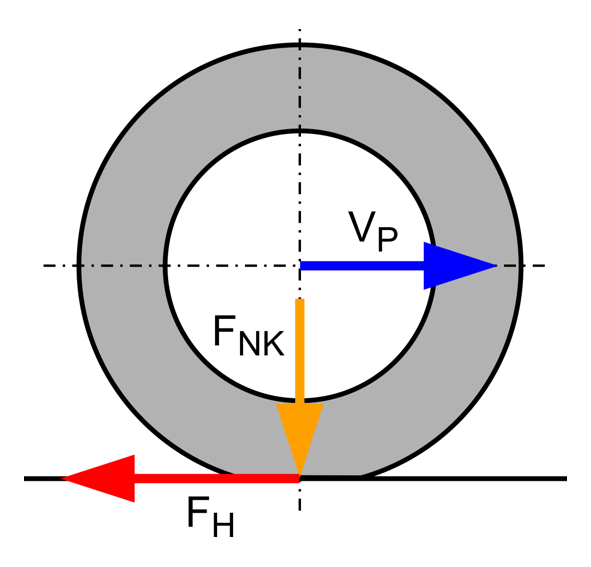
Siła hamowania FH jest skierowana przeciwnie do kierunku ruchu samochodu. Jej wartość obliczamy z wzoru:
![]()
w którym:
FNK – siła nacisku koła na nawierzchnię drogi;
μW – współczynnik tarcia wzdłużnego opony o nawierzchnię drogi.
Wartość siły FNK nie jest stała – zmienia się podczas ruchu pojazdu, a wartość współczynnika tarcia wzdłużnego opony μW, zależy od:
- rodzaju i stanu nawierzchni (np. sucha, mokra itp.), z którą współpracuje opona;
- prędkości ruchu samochodu;
- konstrukcji opony i jej rozmiaru.
Wzdłużny poślizg koła a siła hamowania
Jeśli prędkość obwodowa VO0 punktu położonego na obwodzie koła jest równa prędkości pojazdu VP (jest to też prędkość ruchu osi koła) – rys. 4a, to oznacza, że:
- koło toczy się po nawierzchni drogi;
- pomiędzy oponą a nawierzchnią drogi nie występuje tarcie, a więc nie jest generowana siła hamowania FH.
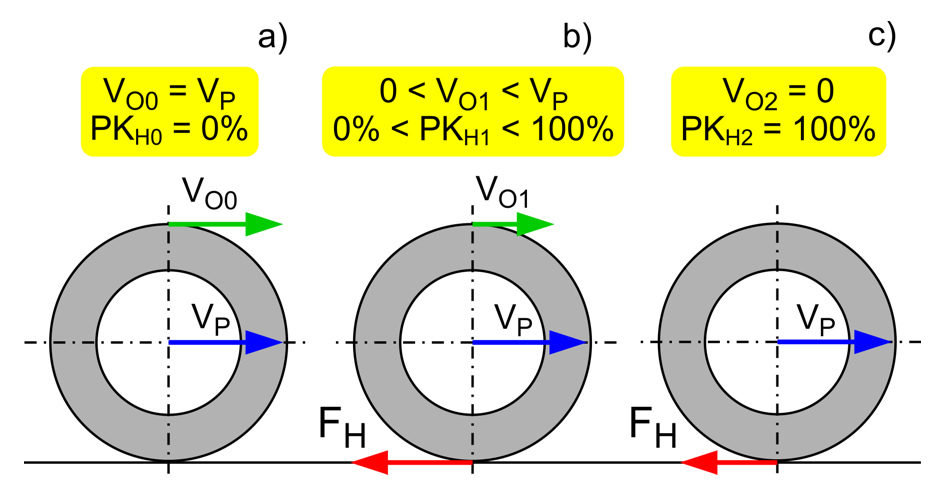
Aby na styku opony z nawierzchnią drogi wystąpiło tarcie, a w konsekwencji powstała siła hamowania FH, prędkość punktu położonego na obwodzie koła VO1 musi być mniejsza od prędkości pojazdu VP. Miarą różnicy pomiędzy oboma prędkościami jest tzw. poślizg koła przy generowaniu siły hamowaniu PKH. Jego wartość obliczamy ze wzoru:
w którym:
VP – prędkość środka koła, równa prędkości pojazdu;
VO – prędkość punktu położonego na obwodzie koła.
Charakterystyczne wartości poślizgu koła podczas hamowania przedstawia rys. 4. Przykład. Jeśli samochód jedzie z prędkością VP = 50km/h, ale prędkość obwodowa hamowanego koła, która wynika z jego prędkości obrotowej, wynosi VO = 40km/h, to znaczy, że koło ma poślizg PKH = 20%.
Proszę zauważyć, że podczas hamowania wartość poślizgu koła może osiągnąć wartość maksymalną 100%. Wówczas koło nie obraca się, jest „zablokowane”.
Siły oporów, siła napędowa i jej wartość
Ruchowi pojazdu zawsze towarzyszą co najmniej dwie siły oporu: toczenia opon i powietrza. Im szybciej jedziemy, to siła oporu powietrza zaczyna bardziej dominować.
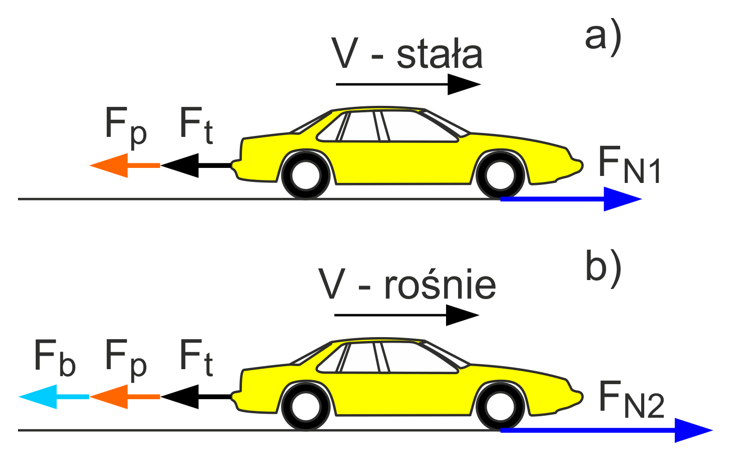
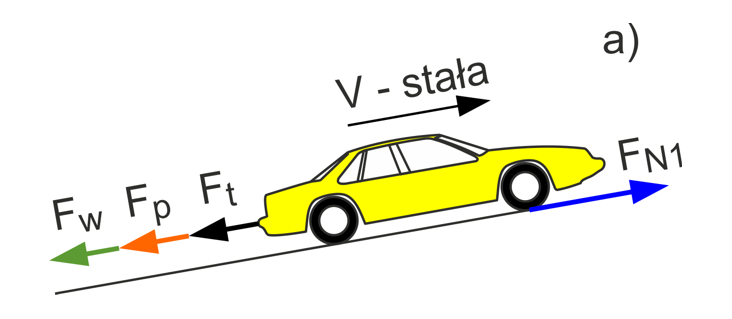
Jeśli samochód porusza się ze stałą prędkością, wówczas siła napędowa FN musi równoważyć tylko siły oporu toczenia opon i powietrza – rys. 5a. Jeśli dodatkowo samochód będzie przyspieszał, to siła napędowa będzie musiała dodatkowo zrównoważyć siłę bezwładności – rys. 5b. Jeśli samochód będzie jechał ze stałą prędkością, ale pod górę – rys. 6, to trzeba będzie pokonać dodatkowo siłę, która chce wymusić ruch samochodu ze wzniesienia, w dół. To tylko przykłady sił oporu i ich „kombinacji”.
Siła napędowa FN powstaje na styku pomiędzy oponą a nawierzchnią drogi – rys. 7. Jej wartość też obliczamy z wzoru nr 1. Zależy ona od tych samych czynników, od których zależy wartość siły hamowania FH.
Wzdłużny poślizg koła a siła napędowa
Wartość siły hamowania FH, jest zależna od poślizgu koła przy generowaniu siły hamowania PKH. Analogicznie wartość siły napędowej FN, jest zależna od poślizgu koła przy generowaniu siły napędowej PKN. Aby uniknąć jego ujemnej wartości, obliczamy go z wzoru:
w którym:
VO – prędkość punktu położonego na obwodzie koła;
VP – prędkość środka koła, równa prędkości pojazdu.
Charakterystyczne wartości poślizgu koła podczas generowania siły napędowej przedstawia rys. 8. Zauważmy, że do powstania siły napędowej konieczne jest, aby prędkość punktu położonego na obwodzie koła VO1 była większa od prędkości pojazdu VP – rys. 8b.
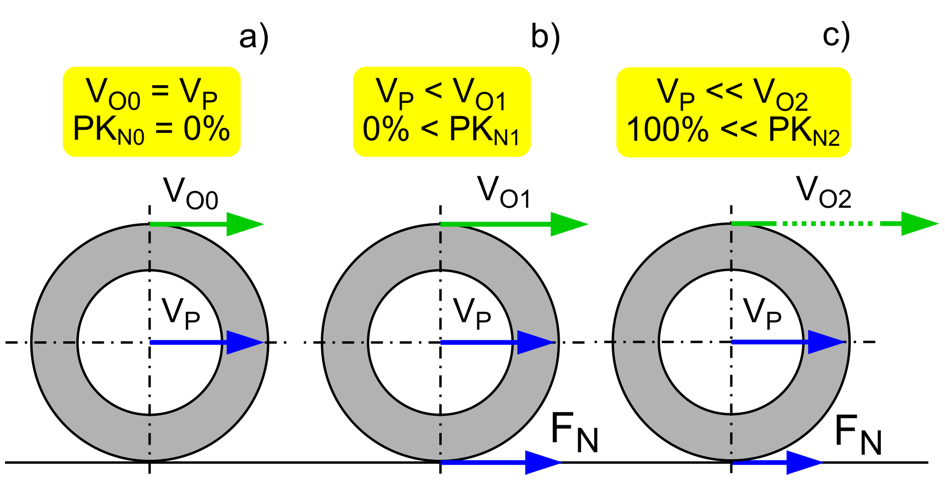
Prędkość punktu położonego na obwodzie koła VO2 może być jednak wielokrotnie większa od prędkości pojazdu VP, wówczas poślizg koła podczas generowania siły napędowej PKN może teoretycznie osiągać dowolnie wysoką wartość – rys. 8c.
Przykład. Jeśli samochód jedzie z prędkością VP = 50km/h, ale prędkość obwodowa przyspieszanego koła, która wynika z jego prędkości obrotowej, wynosi VO = 80km/h, to znaczy, że poślizg koła podczas generowania siły napędowej PKN = 60%.
Wartość siły hamowania lub napędowej w zależności od poślizgu koła
Rys. 9 przedstawia ważny wykres. Będzie on przedmiotem analizy w kolejnych artykułach. Jest to zależność siły hamowania FH od współczynnika poślizgu koła podczas generowania siły hamowania PKH oraz zależność siły napędowej FN od poślizgu koła podczas generowania siły napędowej PKN. Co widać na tym wykresie?
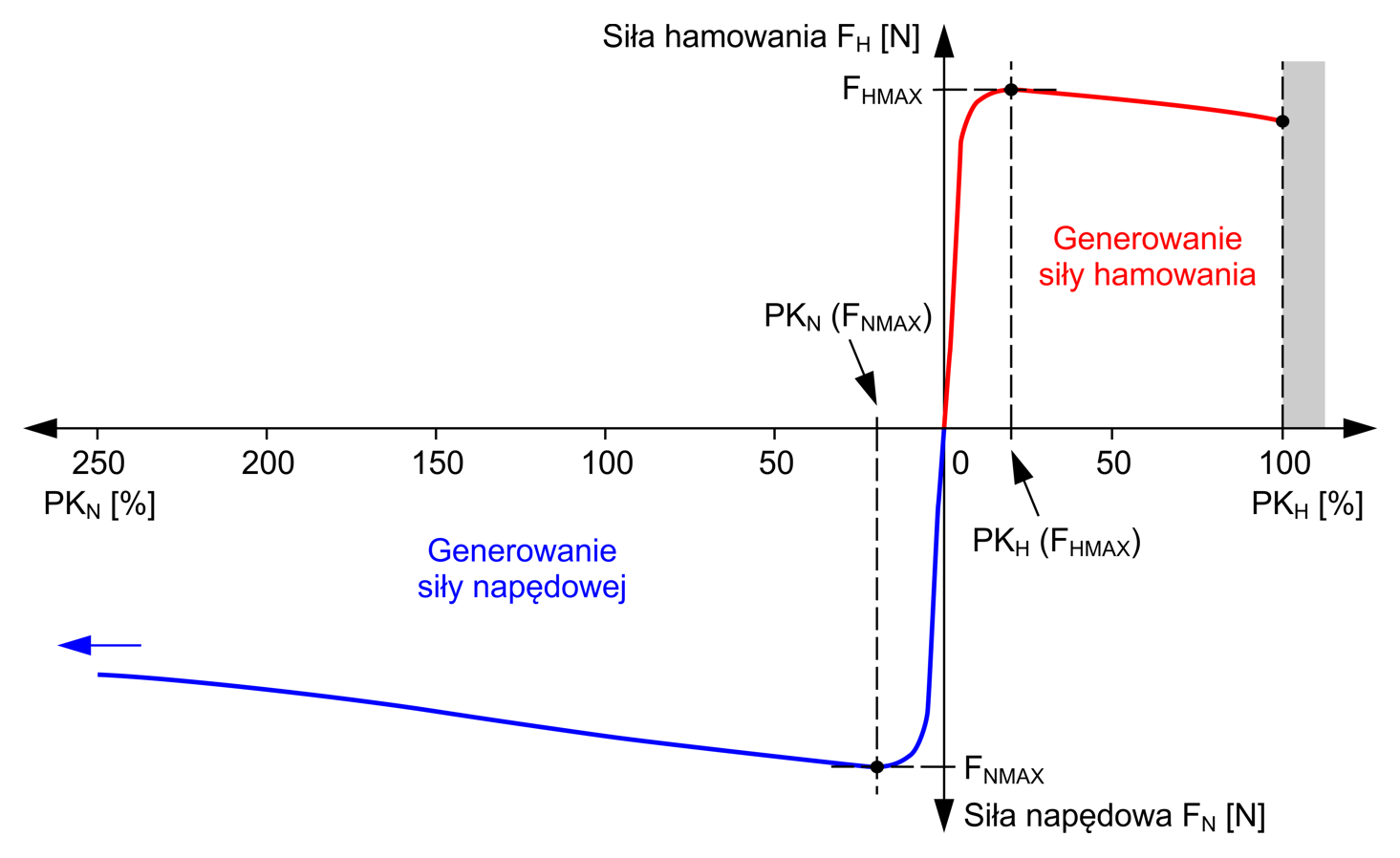
Gdy poślizg koła PKH ma wartość zerową to nie jest generowana siła hamowania FH. Jeśli koło jest hamowane i początkowo wartość poślizgu koła PKH rośnie od zera to również wartość siły hamowania FH rośnie od zera. Dla określonej wartości poślizgu koła PKH(FHMAX) siła hamowania osiąga wartość maksymalną FHMAX. Jeśli poślizg koła PKH nadal rośnie, to wartość siły hamowania FH maleje. Gdy poślizg koła PKH osiągnie wartość 100% wówczas koło zatrzyma się nieruchomo – popularnie „zostanie zablokowane”. Siła hamowania FHMAX dla poślizgu koła PKH o wartości 100% osiągnie wartość niższą od maksymalnej FHMAX.
Gdy poślizg koła PKN ma wartość zerową to nie jest generowana siła napędowa FN. Jeśli koło jest napędzane i początkowo wartość poślizgu koła PKN rośnie od zera to również wartość siły napędowej FN rośnie od zera. Dla określonej wartości poślizgu koła PKN(FNMAX) siła napędowa osiąga wartość maksymalną FNMAX. Jeśli poślizg koła PKN nadal rośnie, to wartość siły napędowej FN maleje i ma wartości niższe od maksymalnej FNMAX.
Proszę zauważyć, że przy generowaniu siły napędowej FN, nie ma ograniczenia wartości poślizgu koła PKN do 100%, tak jak jest przy generowaniu siły hamowania FH. Wartości poślizgu koła przy generowaniu siły napędowej PKN mogą osiągać wartości wielokrotnie większe niż 100% – teoretycznie bez ograniczenia.
Autor: Stefan Myszkowski
Rysunki: Stefan Myszkowski


