Magistrala danych CAN cz. 2.

- Każdy z wpiętych w sieć CAN sterowników otrzymuje identyczny pakiet danych, dzięki czemu zakłócenia transmisji są rejestrowane w każdym podłączonym sterowniku
- Sterownik wpięty w sieć CAN posiada specjalny bufor którego zadaniem jest odbiór i przesył danych
- Zadaniem przewodów oznaczonych jako RX i TX jest transmisja danych pomiędzy sterownikiem a magistralą CAN
- Więcej informacji w polskiej (i nie tylko) branży aftermarketowej i motoryzacyjnej znajdziesz na stronie głównej Motofaktora. Jeśli chcesz być na bieżąco z najważniejszymi wiadomościami z branży — zapisz się na nasz newsletter
Mechanik dysponujący wiedzą na temat sieci CAN jest w stanie dostosować strategię poszukiwania usterek i skutecznie wyeliminować problem. W większości zleconych napraw w obrębie magistrali CAN, dla warsztatu decydującym czynnikiem jest zakres czasu który należy poświęcić na prawidłowe zlokalizowanie źródła awarii.
Szybki transfer danych jaki zapewnia magistrala CAN, pozwala na osiągnięcie czasu dostarczenia informacji dla poszczególnych sterowników praktycznie w czasie rzeczywistym. Co ważne, każdy z wpiętych w sieć CAN sterowników otrzymuje identyczny pakiet danych, dzięki czemu zakłócenia transmisji są rejestrowane w każdym podłączonym sterowniku. Dodatkowo sprawdzana jest wiarygodność przesyłu danych, przy pomocy funkcji monitorowania sygnału wejścia i wyjścia co pozwala zminimalizować ryzyko potencjalnych nieprawidłowości.
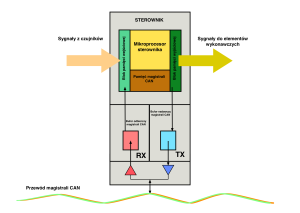
Na ilustracji 1 przedstawiono ideowy schemat sterownika podłączonego do magistrali danych CAN, schemat też pomoże w zrozumieniu procesu wymiany informacji. Sterownik wpięty w sieć CAN posiada specjalny bufor którego zadaniem jest odbiór i przesył danych. Warto przypomnieć iż funkcją każdego sterownika pojazdu jest przetwarzanie sygnałów wejściowych z poszczególnych czujników układu (np. sygnał z sensora temperatury cieczy chłodzącej, sensora prędkości obrotowej wału korbowego) obróbka przechwyconego sygnału, oraz generowanie sygnału wyjściowego przeznaczonego do wysterowania poszczególnych podzespołów wykonawczych (np. cewka zapłonowa, silnik wentylatora chłodnicy).
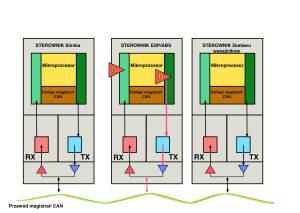
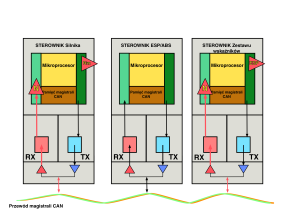
Zadaniem przewodów oznaczonych jako RX i TX jest transmisja danych pomiędzy sterownikiem a magistralą CAN. Przewody te realizują zdania układu nadajnika-odbiornika i są nazywane z angielskiego „transceiver”. Rolą danego transceiver’a jest również dwukierunkowa transformacja strumienia danych polegająca na zmianie sygnału napięcia na logiczny strumień danych (bity) w przypadku przewodu odbiorczego RX, lub odwrotnie zmiana logicznego ciągu danych na sygnał napięcia – przewód nadajnika TX. Rozpatrując połączenie grupy trzech sterowników wpiętych do magistrali CAN (ilustracja 2) widzimy iż każdy z nich posiada wyodrębniony obszar na który składają się: mikroprocesor, przewody układu nadawczo-odbiorczego TX i RX wraz z buforem pamięci magistrali CAN. Na ilustracji 2 i 3 przedstawiono umownie proces transmisji danych pomiędzy sterownikami: jednostki napędowej, systemu ESP/ABS/TCS oraz sterownikiem zestawu wskaźników. Do sterownika systemu ESP/ABS/TCS docierają sygnały z czujników obrotu kół pojazdu, dane z tych sensorów są poglądowo oznaczone czerwoną strzałką z indeksem „N”. Informacja o parametrach prędkości obrotowej poszczególnych kół pojazdu jest doprowadzana przewodem odbiorczym RX, następnie analizowana w procesorze sterownika ESP/ABS/TCS i wysyłana przewodem nadawczym TX ponownie do magistrali CAN. W przedstawionym wariancie zakładamy że prędkość obrotowa kół osi przedniej (osi napędzanej) różni się znacznie od prędkości kół osi tylnej i jest 4,5 razy większa. Algorytm odpowiedzialny za strategię działania systemu ESP/ABS/TCS, rozpoznaje sytuację odpowiadającą poślizgowi kół osi napędzanej, dlatego po obróbce parametrów w mikroprocesorze, podejmuje reakcję i przesyła informacje do sterowników silnika i zestawu wskaźników. W dalszej kolejności sterownik jednostki napędowej, na podstawie otrzymanej paczki danych (strzałki z indeksami N i Nm) rozpoczyna realizacje programu redukcji mocy silnika poprzez kontrolę podzespołów wykonawczych takich jak wtryskiwacze paliwa lub elektroniczna przepustnica silnika tzw. E-GAS. Praktycznie w tym samym czasie, uwzględniając specyfikę magistrali danych CAN, sterownik zestawu wskaźników (ilustracja 3) za pośrednictwem przewodu odbiorczego RX dostaje informacje o aktywacji systemu ESP/ABS/TCS i zapala kontrolkę ESP informując kierowcę o ingerencji tego systemu (strzałki z indeksami N i ESP).
Uproszczony algorytm transmisji danych przedstawiony powyżej, można również zastosować by zrozumieć strukturę magistrali CAN o znacznie większym stopniu skomplikowania. Niezwykle ważna pozostaje kwestia priorytetu otrzymywania danych, gdyż czynnik ten musi zostać uwzględniony przy magistralach do których podłączona jest większa liczba sterowników przesyłających dane równocześnie, więc mogłoby dojść do niepotrzebnej „kolizji informacji”. Najwyższy priorytet posiadają dane decydujące o bezpieczeństwie kierującego i pasażerów, czyli sygnały ze sterowników systemów bezpieczeństwa i układu napędowego. Dlatego inżynierowie projektujący magistralę danych CAN w pojazdach samochodowych wprowadzili specjalne identyfikatory, które są przesyłane przez dany sterownik i jednoznacznie określają jak ważne parametry są przesyłane. Ponadto, magistralę dzielimy na magistralę pozwalającą uzyskać wyższą prędkość transmisji tzw. CAN high (high speed) oraz magistralę niższej prędkości tzw. CAN low (low speed).
Aby w pełni wyeliminować zakłócenia pola elektromagnetycznego związane z pracą rozrusznika, cewek zapłonowych czy wtryskiwaczy powszechnie stosuje się specjalne wzmacniacze różnicowe. Ich zastosowanie pozwala przefiltrować zakłócenia, tak by sygnały wymieniane magistralą CAN cechowały się jak największą dokładnością i były odporne na chwilowe spadki napięcia.
Polecamy także artykuły:
Zdjęcie główne: Marcus Pietrek/Hella


